Biography
I am currently a Tenure-Track Assistant Professor in the Department of Automation at Tsinghua University. I was an Assistant Research Scientist at University of Michigan Transportation Research Institute (UMTRI). Before joining UMTRI, I was a post-doctoral researcher at the Michigan Traffic Lab of the University of Michigan, Ann Arbor, working with Prof. Henry X. Liu. I received the bachelor’s and Ph.D. degrees in the Department of Automation at Tsinghua University, China, in 2014 and 2019, respectively, where I was advised by Prof. Yi Zhang. I was also a visiting Ph.D. student in Civil and Environmental Engineering with the University of Michigan from 2017 to 2019, where I was advised by Prof. Henry X. Liu.
I received the Best Ph.D. Dissertation Award from the IEEE Intelligent Transportation Systems Society (ITSS) in 2020 and the Intelligent Transportation Systems Outstanding Paper Award from the INFORMS Transportation Science and Logistics society in 2021. I am serving various roles in multiple academic organizations, including Member in the SAE On-Road Automated Driving (ORAD) Verification and Validation Task Force, Organizer of the IEEE 2021 Intelligent Vehicles Symposium “Cooperative Driving in Mixed Traffic” Workshop, Organizer of the 38th International Conference on Machine Learning “A Blessing in Disguise: The Prospects and Perils of Adversarial Machine Learning” Workshop, and Organizer of the IEEE-ITSC 2022 workshop “Safety Validation of Connected and Automated Vehicles”. I have also served as Associated Editor of IEEE Transactions on Intelligent Vehicles, Academic Editor of Automotive Innovation, Guest Editor of SAE International Journal of Electrified Vehicles, and Special Issue Editorial Board of Engineering.
My current research interests lie in developing and validating safety-critical machine learning, particularly for connected and automated vehicle testing and evaluation. On these topics, I have published around 30 articles on refereed journals, including Nature, Nature Communications, IEEE Trans. Intell. Transp. Syst., IEEE Trans. Control Syst. Technol., and Transp. Res. Part C Emerg. Technol..
Interests
- Connected and Automated Vehicle Testing and Evaluation
- Cooperative Automation
- Traffic Environment Modeling
Education
Ph.D. in Control Science and Engineering, 2019
Tsinghua University
Visiting Scholar in Civil and Environmental Engineering, 2017-2019
University of Michigan, Ann Arbor
B.S. in Automation, 2014
Tsinghua University
News
- 2023/03: Paper “Dense reinforcement learning for safety validation of autonomous vehicles” was published in Nature and featured on the cover of March 23, 2023 Issue. Media coverage: Nature News, Nature Podcast, Nature Videos, Research Highlights from the Chief Editor at Nature Computational Science, News from NSF, LinkedIn post from U-M President Ono, News from Wall Street Journal, University of Michigan News, News from Tsinghua University, News from TechXplore, News from ScienceDaily, News from Guangming Daily; more news can be found in Altmetric.
- 2022/11: I gave an invited talk titled “Safety validation for autonomous vehicles with naturalistic and adversarial driving environment” at Michigan State University Robotics and Control Seminar.
- 2022/10: I chaired the workshop “Safety Validation of Connected and Automated Vehicles” with Mr. Bowen Weng and Dr. Henry Liu in IEEE-ITSC 2022.
- 2022/07: I gave an invited talk titled “Mcity Safety Assessment Program” with Dr. Henry Liu at National Highway Traffic Safety Administration’s (NHTSA) Vehicle Research and Test Center (VRTC).
- 2022/05: I gave an invited talk titled “Safety Assessment of Autonomous Vehicles in Test Tracks” at Pactrans Doctoral Webinar Series on May 16th at the University of Washington.
- 2022/04: I gave an invited talk titled “SAFE-TEST: Safe AI Framework for Trustworthy Edge Scenario Tests” at the 5th annual CCAT Global Symposium on Connected and Automated Vehicles and Infrastructure.
- 2022/04: I gave an guest lecture titled “Mock On-Road Test for Autonomous Vehicles in Test Tracks” at ME 599 - Dynamics and Control of Connected Vehicles at the University of Michigan, Ann Arbor.
- 2022/03: Special issue “Eco-driving of Connected Electrified Vehicles in Intelligent Transportation Systems” on the SAE International Journal of Electrified Vehicles. Please submit your papers!
- 2021/11: I gave an invited lecture titled “Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment” at the Purdue University.
- 2021/10: Paper “Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment” received the Intelligent Transportation Systems Outstanding Paper Award from the INFORMS Transportation Science and Logistics society in 2021. Media coverage: Center for Connected and Automated Transportation.
- 2021/10: Paper “Optimal Cooperative Driving at Signal-Free Intersections With Polynomial-Time Complexity” is accepted by IEEE Transactions on Intelligent Transportation Systems.
- 2021/09: A toolbox of “Intelligent Driving Intelligence Test” was implmented at the American Center for Mobility (ACM). Learn more about the toolbox for Introduction and Demonstration. Media coverage: Center for Connected and Automated Transportation
- 2021/07: I gave an invited talk titled “Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment” at the Reliable Autonomous Systems Lab at MIT.
- 2021/06: Papers “Corner Case Generation and Analysis for Safety Assessment of Autonomous Vehicles” and “Learning-based Stochastic Driving Model for Autonomous Vehicle Testing” are accepted by Transportation Research Record.
- 2021/06: I gave an online talk titled “Safety Assessment of AVs using a Naturalistic and Adversarial Driving Environment — Research Review” with Dr. Henry Liu at the Center for Connected and Automated Transportation (CCAT) Research Review.
- 2021/05: I gave an online talk titled “Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment” at Stanford Intelligent Systems Laboratory at Stanford University.
- 2021/05: Workshop “A Blessing in Disguise: The Prospects and Perils of Adversarial Machine Learning” in ICML 2021. Please submit your papers here and win the best paper award!
- 2021/04: I gave an online talk titled “ADS safety testing in a naturalistic and adversarial driving environment” at the National Highway Traffic Safety Administration’s (NHTSA) Vehicle Research and Test Center (VRTC).
- 2021/02: I gave an online talk titled “Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment” at the University of Michigan Next Generation Transportation Seminar.
- 2021/02: Paper “Robust Platoon Control in Mixed Traffic Flow Based on Tube Model Predictive Control” is accepted by IEEE Transactions on Intelligent Vehicles.
- 2021/01: Paper “Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment” is accepted by Nature Communications. It has been selected as a featured article at Editors' Highlights on “AI and machine learning”. The aim of Editors' Highlights is to select a small number of articles recently published in Nature Communications that are particularly interesting or important. Media coverage: Center for Connected and Automated Transportation, University of Michigan, TechXplore, Auto-Testing, Sohu.
- 2020/12: I gave an invited lecture titled “Testing and Evaluation of Connected and Automated Vehicles” at CEE 551 - Traffic Science at the University of Michigan, Ann Arbor.
- 2020/10: I gave an online spotlight presentation titled “Testing Scenario Library Generation for Connected and Automated Vehicles” at the award session of the 2020 IEEE Intelligent Vehicles (IV) Symposium.
- 2020/09: I gave an online talk titled “Autonomous Vehicles Safety Assessment Simulation (ASAS) Platform Based on SUMO and CARLA” at the 2020 IEEE Intelligent Transportation Systems (ITSC) Workshop.
- 2020/09: Paper “Testing Scenario Library Generation for Connected and Automated Vehicles: An Adaptive Framework” is accepted by IEEE Transactions on Intelligent Transportation Systems.
- 2020/09: I received the Best Ph.D. Dissertation Award from the IEEE Intelligent Transportation Systems Society (ITSS) for my dissertation, “Testing Scenario Library Generation for Connected and Automated Vehicles.”
- 2020/06: Paper “Safety assessment of highly automated driving systems in test tracks: A new framework” is accepted by Accident Analysis & Prevention.
- 2020/05: Paper “Testing Scenario Library Generation for Connected and Automated Vehicles, Part II: Case Studies” is accepted by IEEE Transactions on Intelligent Transportation Systems.
- 2020/03: I gave an online talk titled “Safety assessment of highly automated driving systems in test tracks: A new framework” with Dr. Yiheng Feng at the Center for Connected and Automated Transportation (CCAT) Research Review.
- 2020/02: Paper “Testing Scenario Library Generation for Connected and Automated Vehicles, Part I: Methodology” is accepted by IEEE Transactions on Intelligent Transportation Systems.
Featured Publications
For the complete list of my publication, please see my Google Scholar page.
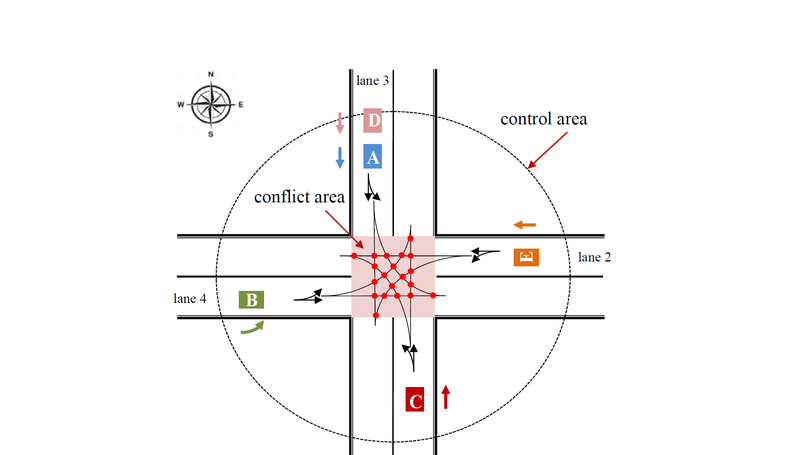
Optimal Cooperative Driving at Signal-Free Intersections With Polynomial-Time Complexity
This paper proposes an optimal and computationally efficient cooperative driving strategy with the polynomial-time complexity. By modeling the conflict relations among the vehicles, the solution space of the cooperative driving problem is completely represented by a newly designed small-size state space. Then, based on dynamic programming, the globally optimal solution can be searched inside the state space efficiently. It is proved that the proposed strategy can reduce the time complexity of computation from exponential to a small-degree polynomial.
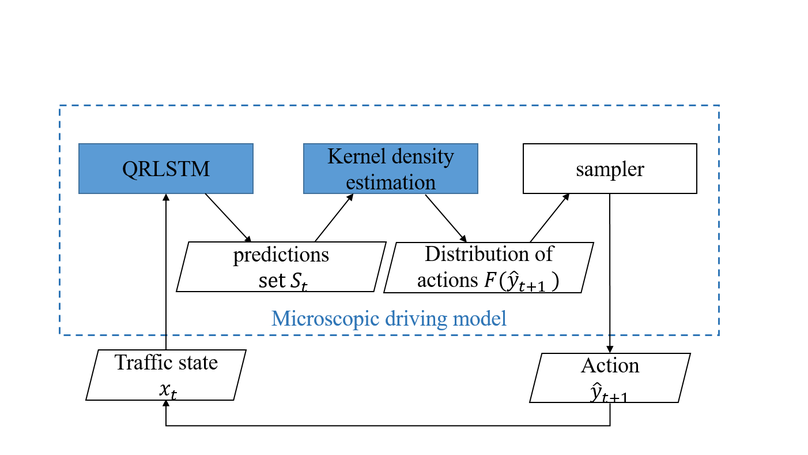
Learning-Based Stochastic Driving Model for Autonomous Vehicle Testing
This paper presents a learning-based stochastic driving model that meets the unique needs of AV testing (i.e., interactive and human-like stochasticity). The model is built based on the long short-term memory architecture. By incorporating the concept of quantile regression into the loss function of the model, the stochastic behaviors are reproduced without prior assumption of human drivers.
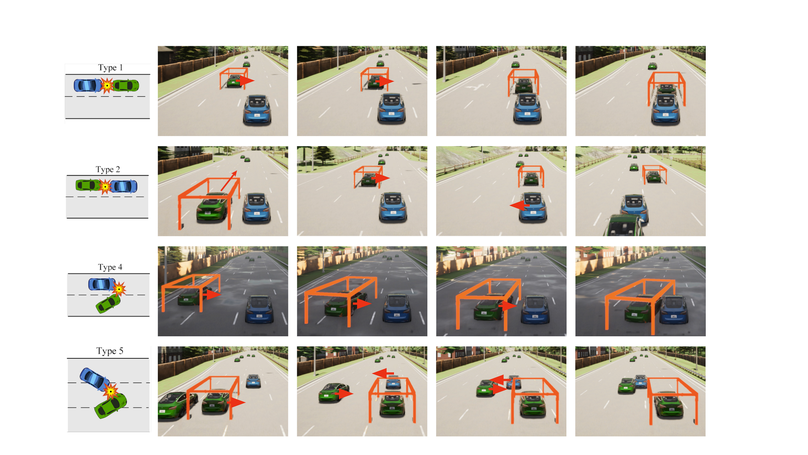
Corner Case Generation and Analysis for Safety Assessment of Autonomous Vehicles
In this paper, a unified framework is proposed to generate corner cases for decision-making systems. To address the challenge brought by high dimensionality, the driving environment is formulated based on the Markov decision process, and the deep reinforcement learning techniques are applied to learn the behavior policy of BVs. With the learned policy, BVs behave and interact with the CAVs more aggressively, resulting in more corner cases.
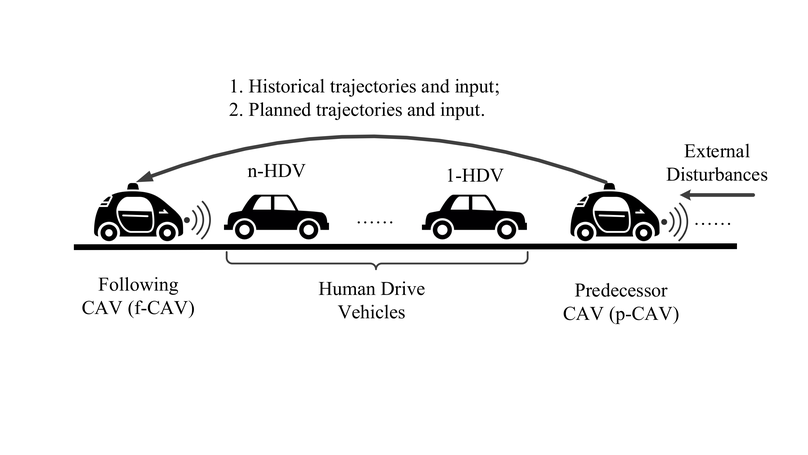
Robust Platoon Control in Mixed Traffic Flow Based on Tube Model Predictive Control
A robust platoon control framework is proposed for mixed traffic flow where connected and automated vehicles (CAVs) and human-driven vehicles (HDVs) coexist. The prediction uncertainty is dynamically mitigated by the feedback control and restricted inside a set with a high probability. When the uncertainty exceeds the set or additional external disturbance emerges, the feedforward control is triggered to plan a “tube” (a sequence of sets), which can bound CAVs' actual trajectories. As the replanning process is usually not required, the proposed method is much more efficient regarding computation and communication, compared with the MPC method.
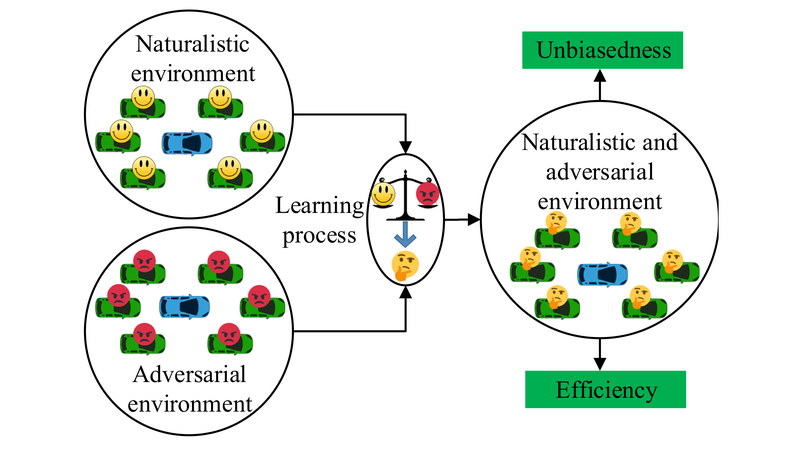
Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment
Tests for autonomous vehicles are usually made in the naturalistic driving environment where safety-critical scenarios are rare. Feng et al. propose a testing approach combining naturalistic and adversarial environment which allows to accelerate testing process and detect dangerous driving events.
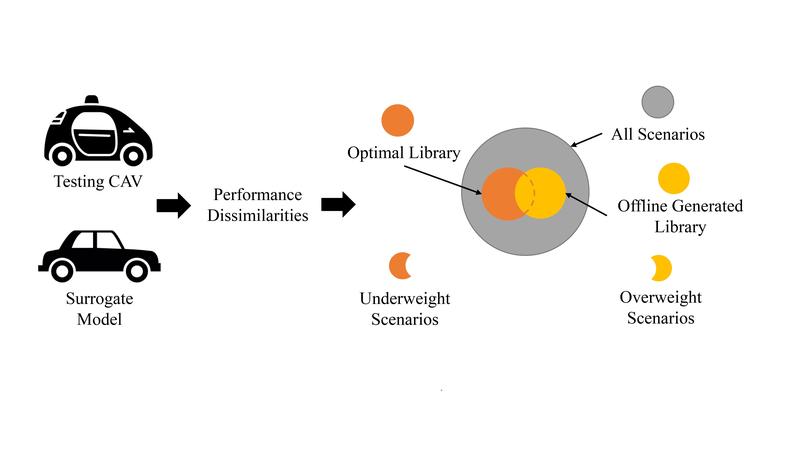
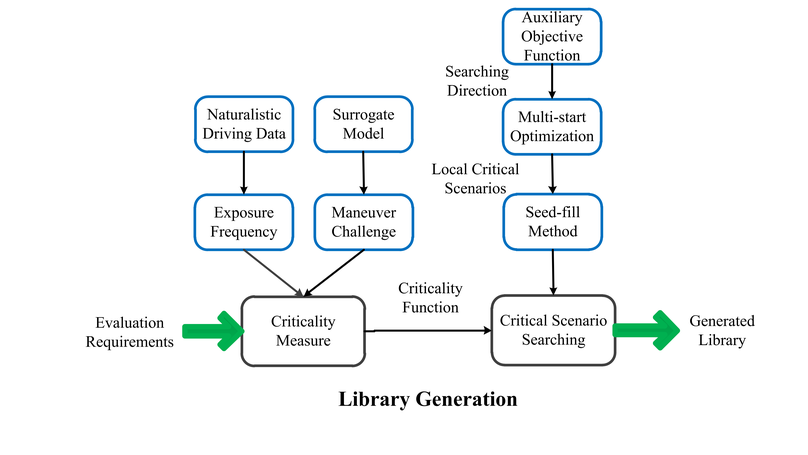
Testing Scenario Library Generation for Connected and Automated Vehicles: An Adaptive Framework
How to generate testing scenario libraries for connected and automated vehicles (CAVs) is a major challenge faced by the industry. In previous studies, to evaluate maneuver challenge of a scenario, surrogate models (SMs) are often used without explicit knowledge of the CAV under test. However, performance dissimilarities between the SM and the CAV under test usually exist, and it can lead to the generation of suboptimal scenario libraries. In this article, an adaptive testing scenario library generation (ATSLG) method is proposed to solve this problem.
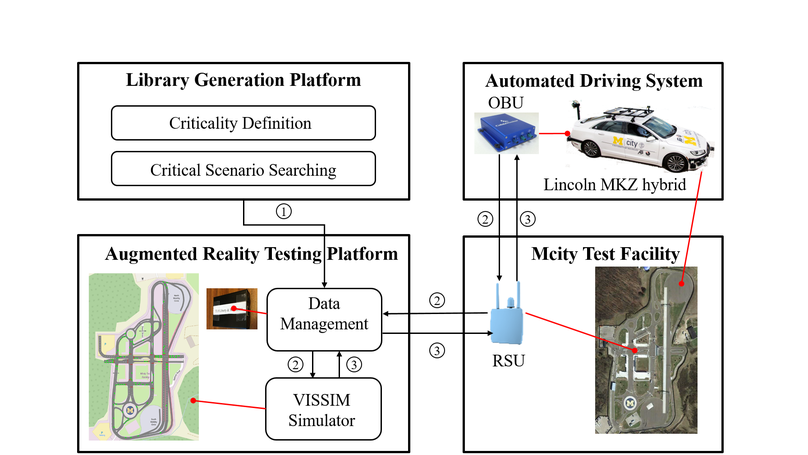
Safety assessment of highly automated driving systems in test tracks: A new framework
This paper presents a new safety assessment framework for highly automated driving systems in test tracks. The framework integrates an augmented reality testing platform and a testing scenario library generation method together. The framework has been implemented in Mcity test facility with a SAE Level-4 ADS vehicle. The framework can accelerate the assessment process by multiple orders of magnitude comparing to the on-road test approach.
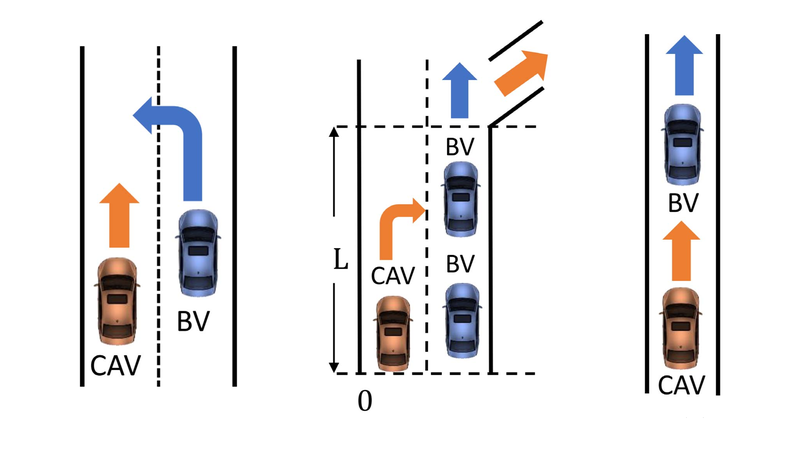
Testing Scenario Library Generation for Connected and Automated Vehicles, Part II: Case Studies
This paper aims to provide implementation examples and guidelines, and to enhance the proposed methodology under high-dimensional scenarios. Three typical cases, including cut-in, highway-exit, and car-following, are designed and studied in this paper.
Testing Scenario Library Generation for Connected and Automated Vehicles, Part I: Methodology
Testing and evaluation is a critical step in the development and deployment of connected and automated vehicles (CAVs), and yet there is no systematic framework to generate testing scenario library. This study aims to provide a general framework for the testing scenario library generation (TSLG) problem with different operational design domains (ODDs), CAV models, and performance metrics.
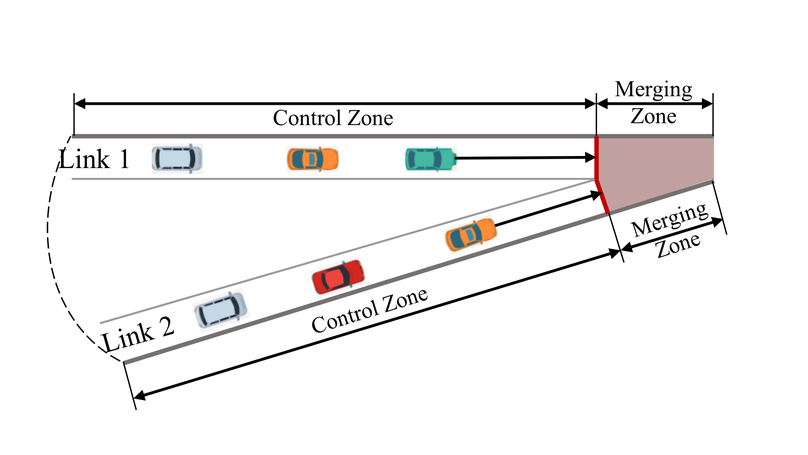
A Cooperative Driving Strategy for Merging at On-Ramps Based on Dynamic Programming
A computationally efficient strategy is proposed to obtain the globally optimal passing order based on dynamic programming (DP). Specifically, the problem of merging at on-ramps is resolved by a DP method, which uses the domain knowledge to reduce the complexity by well defining the state space, state transition, and criterion function. With the DP method, it is proved that the globally optimal passing order can be obtained with the quadratic polynomial computational complexity of O(N^2), where N denotes the number of vehicles.
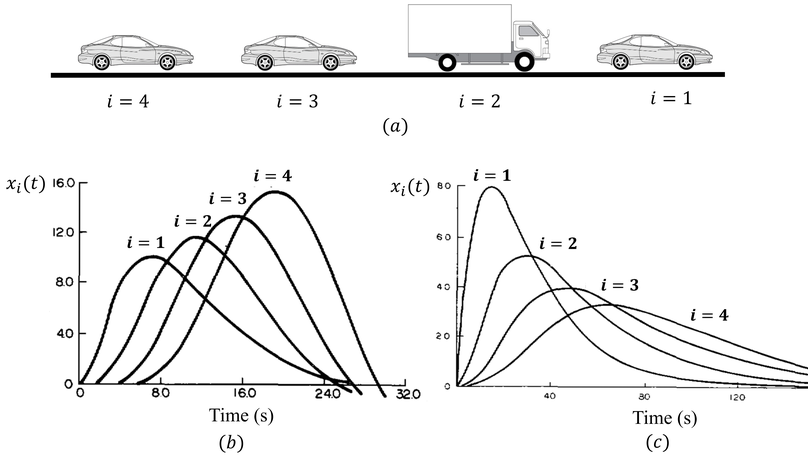
String stability for vehicular platoon control: Definitions and analysis methods
This paper aims to clarify the relationship of ambiguous definitions and various analysis methods of string stability for vehicular platoon control, providing a rigorous foundation for future studies. A series of equivalences are summarized and discussed. The pros and cons of different analysis methods and definitions are discussed, too.
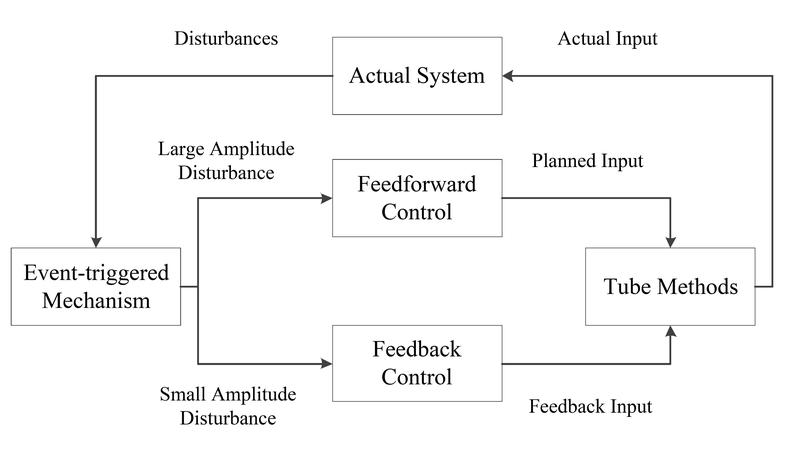
Tube-Based Discrete Controller Design for Vehicle Platoons Subject to Disturbances and Saturation Constraints
Most existing methods for string stability are laborious for implementation without considering either heterogeneous disturbances (e.g., tracking errors and unmodeled dynamics) or saturation constraints (e.g., input saturation). We use feedforward control for large yet infrequent disturbances and feedback control for small yet frequent disturbances. Different from MPC, our feedforward control is event-triggered so that the intervehicle communication and planning costs can be significantly reduced. Different from pure robust feedback control, our combination of feedback and feedforward control could reduce the conservation of the controller.
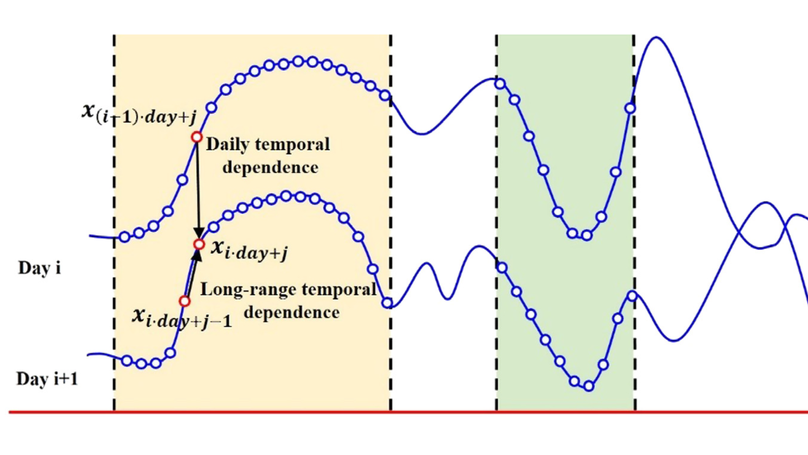
A better understanding of long-range temporal dependence of traffic flow time series
Both the daily and long-range temporal dependence exert considerable influence on the traffic flow series. The daily temporal dependence creates crossover phenomenon when estimating the Hurst. PCA-based method turns out to be a better method to extract the daily temporal dependence.
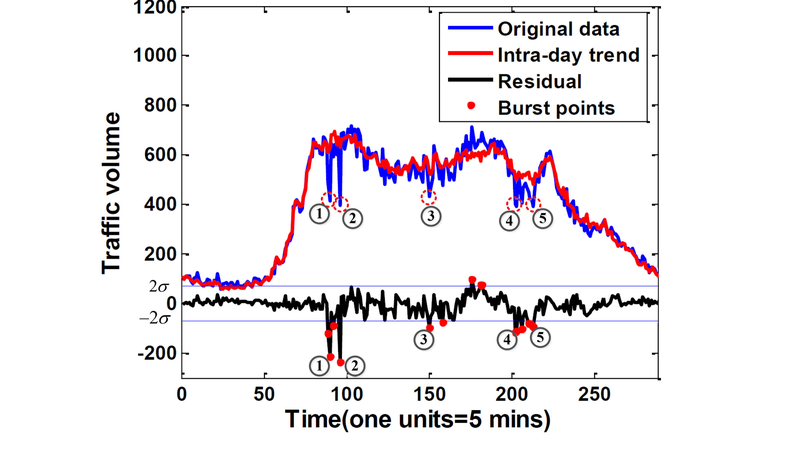
Traffic flow data compression considering burst components
In this study, the authors compare the influence of different data reformatting, archive the bursts defined before in descending order with respect to the absolute value of the burst points and propose a flexible compression framework to balance between burst components and low-dimensional intra-day trend.